|
Digital Convolution数字卷积
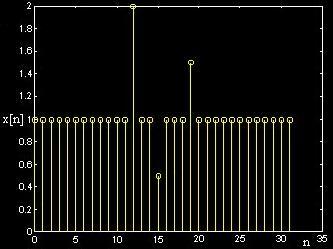
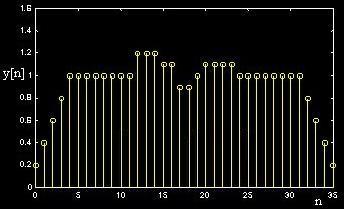
Moving Average
Filtering
滑动平均滤波
Boundary Effects边界效应
Digital
Convolution数字卷积
Definition定义:
Table Representation表格表示:
x[n]=[2,1,-2]
h[n]=[1,2,-1]
|
x[k]
|
|
|
2
|
1
|
-2
|
|
y[n]
|
|
h[0-k]
|
-1
|
2
|
1
|
|
|
|
|
|
y[0]= 2
|
|
h[1-k]
|
|
-1
|
2
|
1
|
|
|
|
|
y[1]= 5
|
|
h[2-k]
|
|
|
-1
|
2
|
1
|
|
|
|
y[2]=-2
|
|
h[3-k]
|
|
|
|
-1
|
2
|
1
|
|
|
y[3]=-5
|
|
h[4-k]
|
|
|
|
|
-1
|
2
|
1
|
|
y[4]= 2
|
|
h[5-k]
|
|
|
|
|
|
-1
|
2
|
1
|
y[5]= 0
|
Convolution and Difference Equation
卷积与差分方程
MA Model:
y[n]
= b0 x[n] + b1
x[n-1] + L+ bM
x[n-M]
Difference Equation:
y[n]
= h[0]x[n] + h[1]x[n-1] + L+ h[M]x[n-M]
General Model:

y[n]
=L+ h[-2]x[n+2]
+ h[-1]x[n+1] +
+h[0]x[n]
+ h[1]x[n-1] + L
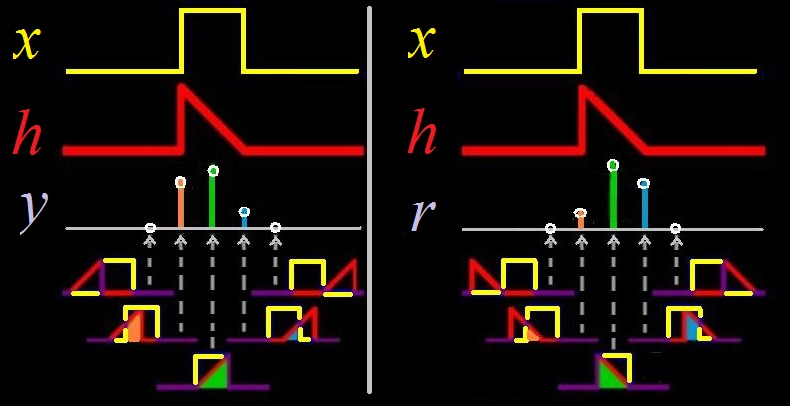
Convolution vs
Correlation
Boundary Effects边界效应
h=[4,
-1, 2, -3]
|
x[k]:
|
|
h[-k]:
|
|
h[1-k]:
|
|
h[2-k]:
|
|
h[3-k]:
|
|
...
|
|
h[9-k]:
|
|
h[10-k]:
|
|
h[11-k]:
|
|
h[12-k]:
|
|
|
|
1
|
-2
|
3
|
1
|
5
|
2
|
0
|
1
|
2
|
4
|
|
|
-1
|
4
|
|
|
|
|
|
|
|
|
|
|
|
2
|
-1
|
4
|
|
|
|
|
|
|
|
|
|
|
-3
|
2
|
-1
|
4
|
|
|
|
|
|
|
|
|
|
|
-3
|
2
|
-1
|
4
|
|
|
|
|
|
|
|
|
...
|
|
|
|
|
|
|
|
|
-3
|
2
|
-1
|
4
|
|
|
|
|
|
|
|
|
|
|
-3
|
2
|
-1
|
4
|
|
|
|
|
|
|
|
|
|
|
-3
|
2
|
-1
|
|
|
|
|
|
|
|
|
|
|
|
-3
|
2
|
|
|
y[n]
|
|
y[0]=4 ?
|
|
y[1]=-9 ?
|
|
y[2]=16 ?
|
|
y[3]=-6
?/span>
|
|
...
|
|
y[9]=16 ?/span>
|
|
y[10]=-3 ?
|
|
y[11]=2 ?
|
|
y[12]=-12 ?
|
|
Transients瞬态 & Steady State稳态
(FIR Filter)
Approximately近似 Steady State
(Stable IIR
Filter)
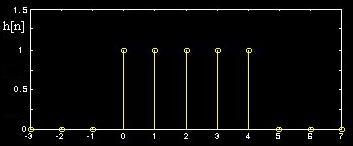
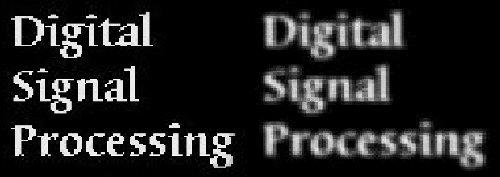
M-Term MA Filter滑动平均滤波器
1-D M-term MA Filter


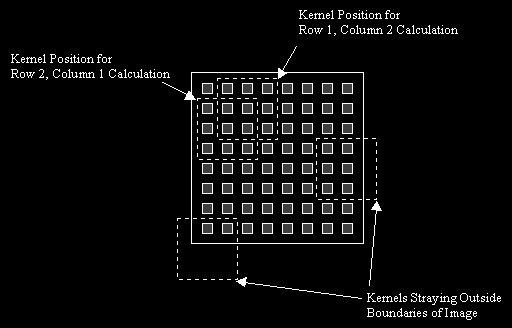
2-D M-term
MA Filter
|
Convolution Kernel卷积核:
|
|
Mistake on page 163
|
